
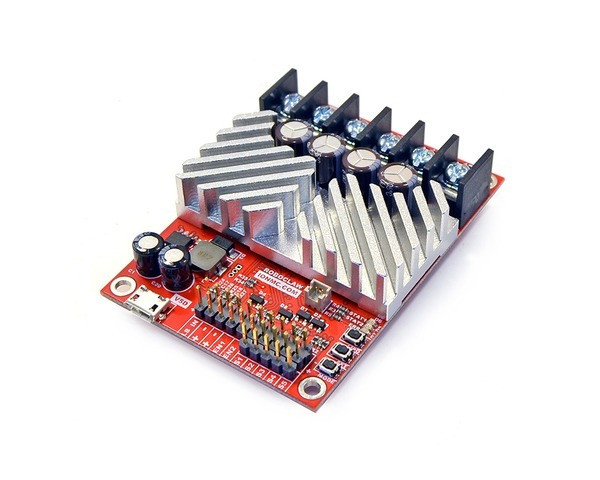
RoboClaw 2x15A Motor Controller (V5E)
")
")
")
")



₹ 15,999.00 *
Prices incl. GST
Ready to ship today,
Delivery time appr. 1-3 workdays.
1 in stock
- Product Code: Pololu-3285
- MPN: 3285
")
")
")
 - Lite")



Viewed
Prices incl. GST
Ready to ship today,
Delivery time appr. 1-3 workdays.
1 in stock