















Prices incl. GST
Out of Stock.
- Product Code: MIKROE-2228
- MPN: MIKROE-2228
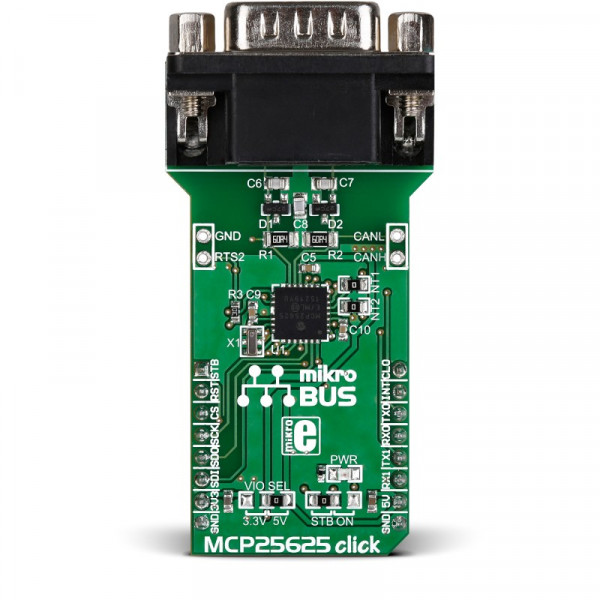
Named after the main chip, MCP25625 click also has a RS232 port, which is a standard connector for CAN communications. Additionally, the two CAN wires (CANL and CANH) can also be connected directly through two pins on the right edge of the board.
The click communicates with the target MCU through the SPI interface — although there are additional options that take the load off the target board MCU. To that end, all 16 mikroBUS™ pins are connected. There’s a clock output, a Request To Send, an Interrupt, standby, reset and more. MCP25625 click can work with both 3.3V or 5V logic levels.
Specification
| Type | CAN |
| Applications | MCP25625 click also with RS232 port allows CAN communications |
| On-board modules | Microchip CAN controller |
| Key Features | Operating speeds up to 1 Mb/s, SPI interface (up to 10 MHz Clock speed) with additional pins |
| Key Benefits | Interface with a lot of options to offloads target board MCU, Meets requirements of automotive industry (speed, EMC, ESD) |
| Interface | GPIO,SPI,UART |
| Input Voltage | 3.3V or 5V |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
MCP25625 click is a mikroBUS™ add-on board carrying a Microchip CAN controller with an integrated transceiver. It meets the automotive requirement for high speed operation (up to 1 Mb/s).
Features and usage notes
MCP25625 click has two pairs of onboard jumpers (zero ohm resistors). One is for choosing the IO voltage. The other is for configuring whether the STB pin will be used to control the click’s operating mode (normal or standby), or if it will go into normal mode as soon as it’s powered up.
Here’s a list of key features of MCP25625, taken from the data sheet:
General Features:
- Stand-Alone CAN2.0B Controller with Integrated CAN Transceiver and Serial Peripheral Interface (SPI)
- Up to 1Mb/s Operation
- Very Low Standby Current (10 μA, typical)
- Up to 10 MHz SPI Clock Speed
- Temperature Ranges:
- Extended (E): -40°C to +125°C
CAN Controller Features:
- ImplementsCAN2.0B(ISO11898-1)
- Three Transmit Buffers with Prioritization and Abort Feature
- Two Receive Buffers
- Six Filters and TwoMasks,with Optional Filtering on the First Two Data Bytes
- Supports SPI Modes 0,0 and 1,1
- Specific SPI Commands to Reduce SPI Overhead
- Buffer Full, and Request-to-Send Pins Configurable as General Purpose I/O
- One Interrupt Output Pin
Programming
The following code snippet shows how to change the device's operating mode and checks the status register for confirmation.
1 int mcp25625_mode
2 (
3 can_opmode_t mode
4 )
5 {
6 can_ctl.reqop = mode;
7 can_ctl.mask = CAN_REQOP;
8
9 mcp25625_hw_ctl_update( ( void* )&can_ctl );
10
11 if( mcp25625_hw_ctl_get( ( void* )&can_stat ) )
12 if( can_stat.opmod != mode )
13 return MCP25625_CTL_ERR;
14
15 return MCP25625_OK;
16 }
Code examples that demonstrate the usage of MCP 25625 click with MikroElektronika hardware, written for mikroC for PIC are available on Libstock.